

TauLabs Sparky2.0 CC3D REVO
- Delivery Time:
- 5 Days
Quantity:
Your message must be between 20 to 2000 characters
Contact NowBasic Info
Basic Info
| Place of Origin: | China (Mainland) |
|---|
Product Description
Product Description
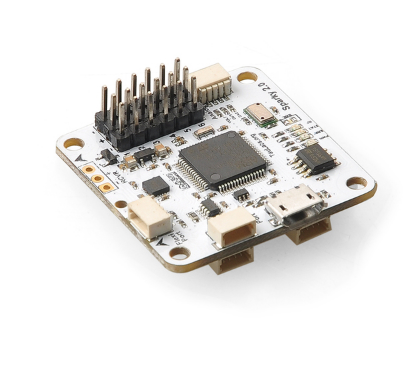
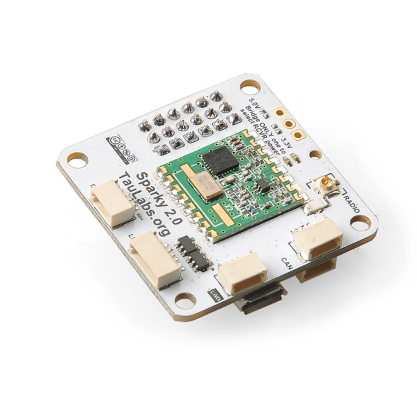
Features TauLabs Sparky2.0 CC3D REVO Product Details Runs Tau Labs (of course ;-). Same great flight performance you've come to expect and standard features. Open source hardware! (also of course) More powerful processor. Uses an STM32F4 running at 168 Mhz with increased memory and flash. This is useful for storing and flying longer waypoint sequences and running more complicated code like picoC scripting. More connectivity. (RCVR, Flexi, Main, I2C Aux). This is really useful if you want to have an external mag, gps, and spektrum receiver or other things like OSD. Flash chip which can be used to store flight plans, picoC code, or logging RFM22b radio can be used for telemetry or with openLSRng. The receiver antenna uses the same * U.Fl. connector that Freedom has. I really like this because it is very small and you can easily add an SMA break out cable or a whip antenna. It also has just the right amount of tension - strong enough to hold together in flight but in a crash it will disconnect and not damage the board. There is a small hole at the front to provide strain release for a whip antenna that you can just pass through and solder straight to the RFM22b for minimal configurations. OpenLRS support directly control from your OpenLRSng radio if you don't want a TauLink. Also OpenLRS beacon for finding lost frames. FrSky Telemetry support for either Sensor Hub or S.Port style receivers. Four buffered outputs to drive either LEDs (indicate flight status) or brushed motors. I'm really excited to have different colored LED strips turn on to indicate the direction it is facing relative to home. DAC output for VTX audio telemetry. I'd like to be able to add some prerecorded audio sounds so the headphones can provide useful information for FPV. Dual analog input for voltage and current monitoring. The DAC output can also be used as an analog input. CAN Bus which is very useful for talking to external devices like the brushless gimbal to coordinate POI tracking or control the gimbal pitch from transmitter. Also CAN enabled ESCs are coming out which will allow serious improvements in flight quality. Full sensor suite of course. MS5611 baro and MPU-9250 combined gyro/accel/mag. I was really conflicted on switching from the MPU-9150 to the MPU-9250. However, being able to utilize an SPI bus which is much better handled on the processor side made it worthwhile. Optional single sided assembly - the necessary things to fly are all on the top of the board. The bottom has the CAN bus connector, RFM22b, antenna, external LED drivers. So if you just want a more powerful flight controller with more memory and CPU over Sparky it's still single sided.? Ports Top connectors: Main Port: USART1. Capable of Telemetry, GPS, DSM, Debug, ComBridge, MavLink, HOTT, FrSky Sensor, Lighttelemetry, PicoC FlexiPort: USART3/I2C2. Similar to MainPort but also capable of external I2C. Rcvr: USART6. Convenient connection for receivers with selectable power between external power or 3.3V. PPM, S.Bus, DSM, HOTT. Analog: current, voltage, RSSI or DAC output Servo outputs: 6 PWM headers. capable of traditional PWM or OneShot. Bottom connectors: Radio: U.Fl. header for RFM22b module. Typically 433 MHz module. Either use a433Mhz U.FL ferrite Antenna or433Mhz U.FL Helical antenna Power selector: select power for the Rcvr header by soldering either the 3.3V bridge or 5.0V (which passes power from the external power supply such as BEC) CAN: CAN bus header. Used for connecting to external devices such as SparkyBGC or TauOSD+VTX. I2C: auxiliary I2C bus (I2C1). This is the same bus that the MS5611 is connected to. can be used for external mag. LED: 4 buffered PWM outputs. These are passed through an N-channel FET Can power external LEDs or brushed motors (rated for 3A) Using buffered PWM outputs These outputs can handle more current and can be used for directly controlling external LEDs (see video here ). These are mapped in software to PWM 7-10 and are available on the "LED" header on the back which is a 6 pin JST-SH header. They use an N-Channel FET so when the PWM pulse is high the FET is on and pulling the output towards ground. Looking at the board as shown above, the pins are from left to right Ground Power PWM7 PWM8 PWM9 PWM10 The power pin is connected to the power on the servo headers, so you can use this power pin to drive your LEDs if they are 5V tolerant and the BEC can handle the current. If you want to use the outputs to directly control a servo or ESC you either need to remove the output FETs and solder wires to bypass them (photos to come) or use an external board that inverts them again (design to come on OSHPark). Item Packing TauLabs Sparky2.0 CC3D REVO 

Related Keywords
Related Keywords
You May Also Like
You May Also Like
-

2-8S Large Current Fast Charging Balance Harness EVPBCB

XERUN V10 Competition Motor 13.5T 2760KV

XERUN V10 Competition Motor 10.5T 3450KV
Related ProductsProduct Categories-
RC Multicopter (FPV)(375)
- Retractable Landing Gear(20)
- Multicopter Frame(22)
- Multicopter Gimbal(28)
- Brushless Gimbal Motor(28)
- FPV/OSD/Aerial(32)
- Multicopter Control version(26)
- Multicopter Motor(24)
- Multicopter ESC(20)
- Multicopter FPV TX & RX(26)
- Antennas(1)
- Multicopter Camera(27)
- Multicopter Accessories(31)
- Multicopter propeller(30)
- Multicopter FPV Monitor(28)
- FPV Wireless AV Module(6)
- FPV Airplane(5)
- DJI Universal Accessories Wholesale(15)
- Other(6)
-
Custom-made Servo(7)
-
Gasoline Airplane(18)
-
R/C Boat(12)
-
Feetech RC Servo(32)
-
R/C Quad Flyer(150)
-
R/C Helicopter(41)
-
R/C Plane& Accessories(120)
-
R/C Car(39)
-
R/C Transmitter and Receiver(31)
-
Brushless Motor(111)
-
Brushless ESC(69)
-
R/C Engine(49)
-
R/C Servo & Parts(96)
-
R/C Charger(53)
-
R/C Batteries & Parts(58)
-
R/C Electron Equipment(5)
-
R/C Accessories/Tool(71)
-
Ungrouped(30)
-
RC Robot DIY(29)




